

0
items
$0
First Toy: RoboSENSEi
Role
Researcher and Interaction Designer
Client
Capstone Project for graduate class at the University of Michigan, Ann Arbor
Summary
RoboSENSEi is a toy for young children with special consideration for autistic kids. The design is simple and stimulates the senses of touch and sound by providing different materials to be touched and sound feedback. It encourages creativity by giving kids the chance to customize their toy and create their own stories.
Challenge
To provide the right sensory experience for autistic kids, the toy has to incorporate small motor skills in order to allow them to practice their haptic skills and intrigue their curiosity to explore. The challenge here is how do I design a an attractive toy experience that takes into consideration some design constraints to accommodate the needs of autistic kids?
The research behind the toy is documented and published in this paper
Process
The design process consists of research, interviews, sketching and prototyping.
Users Group
RoboSENSEi is designed for kids older than 24 months with special consideration during the design process for autistic kids. Autistic kids are characterized with difficulties in their communication and interactions. They tend to respond more efficiently to proximal senses like touch and proprioception more than distal senses to process information like vision. In this paper we explore the design of a toy that triggers their sense of curiosity to explore different materials and audio stimuli.
Research and Interview
The design process started with a market research phase to see what is already out there in the Toys’ market. According to the shop owner, toys are not usually made specifically for autistic kids since each autistic individual might have a specific need different from others. However, usually toys that are meant for kids could also be used by autistic kids depending on their needs. Usually toys that are meant to be moved and have bigger shapes are the ones suitable for autistic kids. I went through some of the toys that she referred to in her shop and noted down some common features, she also mentioned that a good source to look at are the Toy Fairs that are held periodically nationwide, which will give me a greater exposure to what the trends are in the market. I looked into toy design resources and other online toy stores to compare the features and trends. All of them provided simple interactions. Some provided no feedback and some provided subtle feedback, either visual or audio.
Local Toy Store where I performed part of my field research
After performing the field research I started to read what experts are saying about toy design and specifically, incorporating sensors and adding sense to the playful experience. According to Barry Kudrowitz in Designing for emerging technologies, toys tend to use technology when it’s at the end of the s-curve and the reason is that toys use technologies when their prices fall down. The shape of technology life cycle follows an s-curve in which it starts with research and development followed by an ascent phase then a maturity phase and ends with a declination phase. Toy buyers are not willing to pay high amount of money on toys, for kids. So it is rare in which toys incorporate new emerging technologies.
Design
Synthesizing the information I gathered from the researchers led me to narrow down the thinking process and focus on producing a toy that is cheap, engaging and smart. So I scoped down my research questions into: How do I design a cost efficient toy that stimulates the senses for kids, especially autistic ones? How could I take advantage of ubiquitous computing in designing simple toys?
Following research and scoping down the design, I sketched multiple toys and shared the ideas with other designers around me. I then consulted the design lab to ask about prototyping opportunities and materials. One of the challenges I faced was making sure that the material used is going to provide a functional design. For example, one of the ideas I started to work on was a walking robot toy which was a case for an iphone that relied on vibration to walk. The material of the robot was heavy and the vibration couldn’t provide enough movement to be noticed immediately by the player.
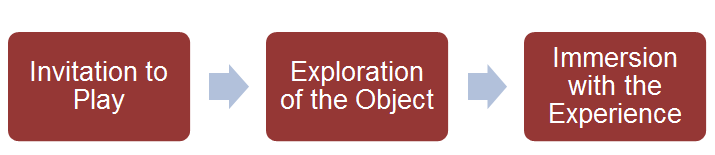
The interaction experience was initially designed as an open-ended play approach in which the gameplay is unguided and there is no end goal. As I started iterating through the sketching process I decided to add more structure to the experience by designing for the stages of playful interaction.[1] The stages are as indicated in the following diagram . The playful experience starts with the inviting shape of the object, which is simple and consists of different textures and spaces. The different materials used and the sound feedback that is mapped to the movement encourage exploration. Finally, the space to customize the toy and draw will create an immersive experience to the child with some direction in the gameplay.
The three stages of playful interaction
The app accompanying the toy provides the toy control system in which movements are captured and mapped into corresponding sounds. Rotation and acceleration data is captured through the gyroscope and accelerometer which is built in new phones. The data is then sent to the mapping engine to provide the robotic sounds which were synthesized using max msp.
A mock up of the app. It's simple and colorful.